
ROS2 und Windows Subsytem for Linux (WSL2)
Die Herausforderung die sich mir kürzlich stellte, war es unter Windows 11 eine ROS 2 – Humble (gilt sicher auch
Roboter, Raspberry Pi und Jetson Nano
Die Herausforderung die sich mir kürzlich stellte, war es unter Windows 11 eine ROS 2 – Humble (gilt sicher auch
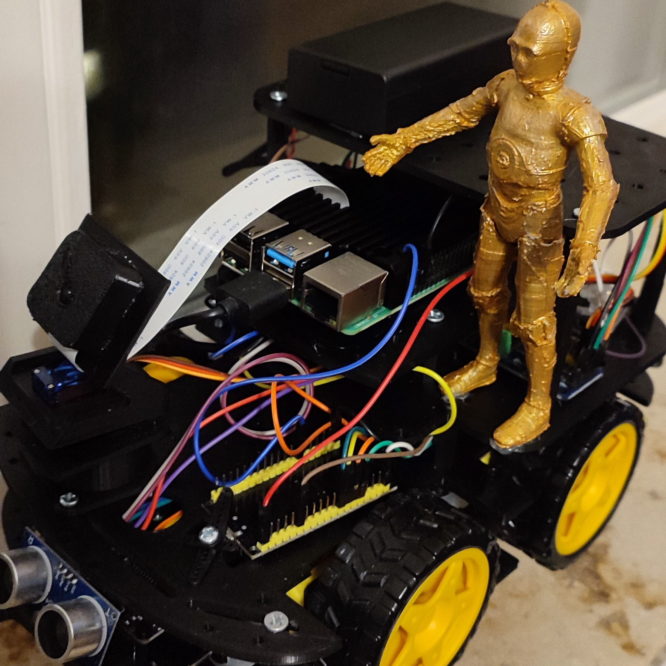
Seit längerem mal wieder ein Beitrag zu einem fertig gestellten Roboter. Ein kleines „Master-Piece“, wenn man so will. Die Vorlage
Unter Windows 10 (11) entwickle ich per SSH Remote Konsole auf dem Raspberry PI mit Visual Studio Code. Hier benötige
Robot Operating System, kurz ROS, ist ein Framework, um den Herausforderungen, die sich Entwicklern bei der Erstellung von Roboter-Anwendungen stellen,
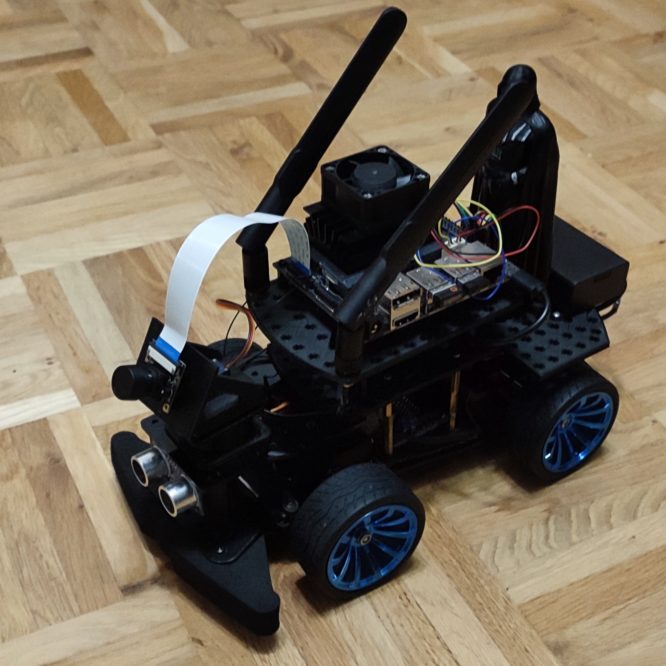
Natürlich muss das Automatische Programm für die Fahrzeugsteuerung zum Autonomen Fahren des Roboters auch für die Vier-Rad Steuerung laufen. Wie
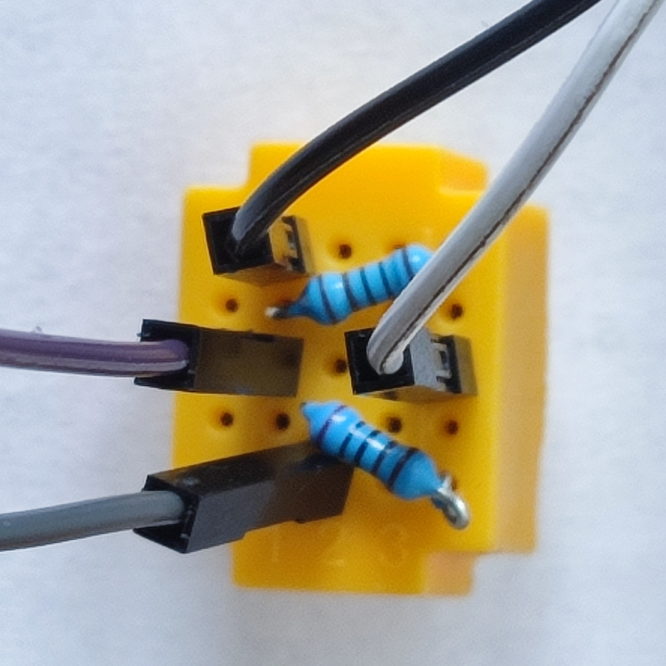
Das Internet ist voll von unnötigen und teilweise wirklich blöden Anleitungen und Anweisungen, wenn es um die Bluetooth Unterstützung oder
weiterlesenUbuntu 20.04 auf Raspberry Pi mit ROS2, Bluetooth, I2C und Kameraunterstützung
Jeder Roboter-Typ soll einen Fahrer bekommen. Da sich Luke dazu nicht so sehr eignet, habe ich mich entschlossen den Roboter
Seit ich mir Ende November den 3D Drucker: Anycubic Vyper* zugelegt habe, beschäftige ich mich hauptsächlich mit den Möglichkeiten die
Phase 1: Das Auto soll in alle Richtungen fahren können.Das Auto soll vorwärts und rückwärts fahren können.Es soll von einem
Auf robot-bench.com soll es um Roboter, Raspberry Pi (4, Zero, Pico), ESP32 und Jetson Nano gehen. Ich will auf dieser