Seit ich mir Ende November den 3D Drucker: Anycubic Vyper* zugelegt habe, beschäftige ich mich hauptsächlich mit den Möglichkeiten die provisorischen Anteile der Roboter zu beheben. Den Fortschritt der Anpassungen dokumentiere ich in diesem Beitrag.

Fortschritte:
- Panzertape und Pappkarton ersetzen mit geschraubten (oder geklebten) Ebenen
- Ergänzung von in 2 Achsen beweglichen Kameras (Yoda und Luke)
- Ergänzung von in einer Achse beweglicher Kamera (Darth).
- Ergänzung von Sensoren, die Hindernisse am Boden und in der Nähe identifizieren
- Änderung bei der Stromversorgung des Yoda – Roboter – Chassis: Nur noch 2 x NCR18650PF Akkus von Panasonic mit Schutzschaltung und max. 9A über USB-DC/DC Wandler*.
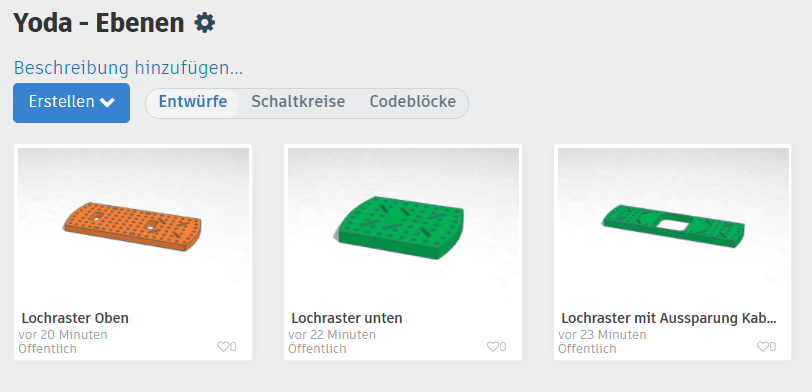
Die Ebenen habe ich mit Tinkercad erstellt. Ausgangspunkt war das Thingiverse Objekt: https://www.thingiverse.com/thing:1900521. Man kann das natürlich auch mit FreeCad, Blender oder einem anderen 3D Programm durchführen. Thinkercad ging definitiv am schnellsten und war zudem extrem einfach. Für meinen aktuellen Bedarf geradezu ideal.
Freecad ist mir zudem beim Umrechnen des Lochmusters in ein Solid ständig abgestürzt. Nachdem ich das 3D-Modell dann mit Tinkercad geladen und von dort exportiert hatte, konnte ich es mit Freecad bearbeiten, aber die einzelnen Schritte dauerten eine halbe Ewigkeit. Ich nehme an, es liegt daran, dass Freecad die 3D Grafikkarte des Rechners nicht verwendet und zudem aufwendigere Berechnungen bei der Umsetzung von 3D durchführt.
Kabelmanagement
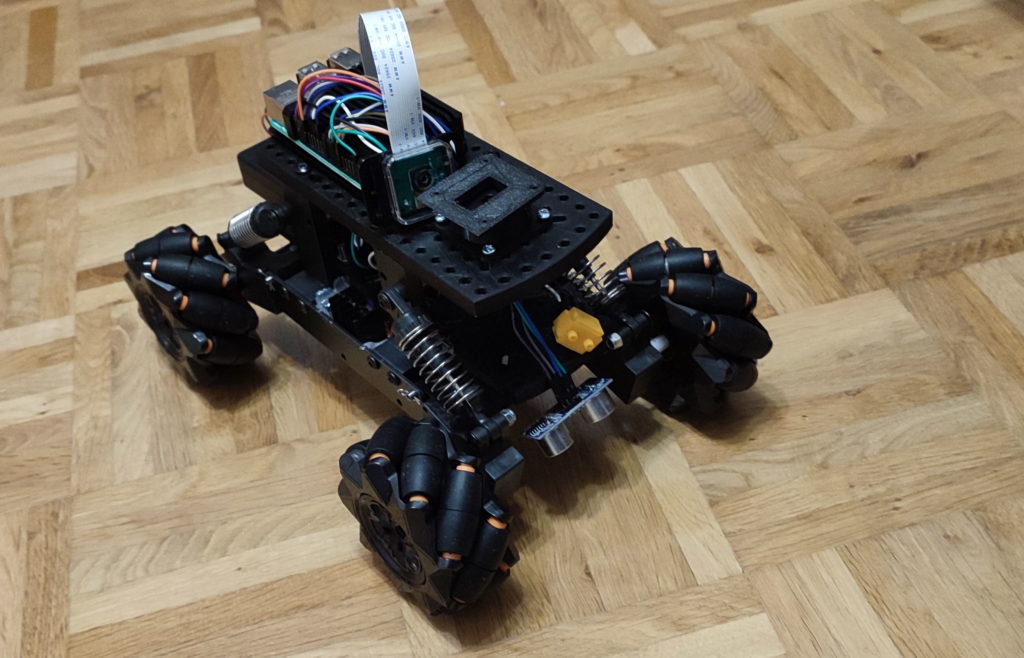
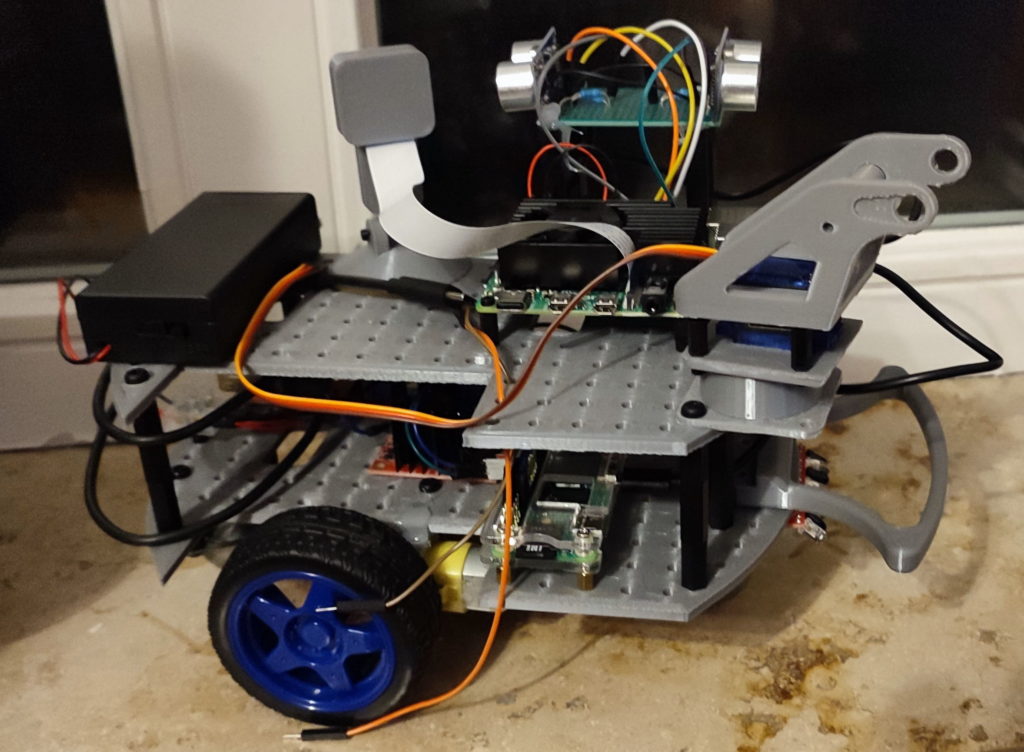
Wie man auf dem Bild erkennen kann, sind die Panzertape Befestigungen nun vollständig verschwunden. Die Motorsteuerung befindet sich in einer leicht versenkten Ebene. Die Kabel musste ich dabei 2-mal vollständig lösen und durch die Durchführungen der Ebenen ziehen.

Die 3D-Entwürfe der Ebenen können bei Interesse hier heruntergeladen werden:
https://www.tinkercad.com/users/kx2H7OQhjKl-weboliver
Für die Kamerahalterung habe ich eine Kamera Standhalterung umgearbeitet und die Kameraaufnahme an die 5MP Raspi Kamera angepasst:
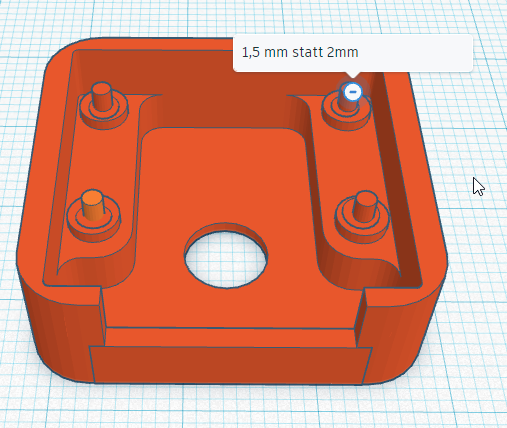
Jetzt lässt sich die Kamera auch in das Gehäuse einsetzen ohne dabei die Stecker abbrechen zu müssen.
Für das zu einem späteren Zeitpunkt geplante Lidar bekommt der Yoda-Roboter eine vierte Ebene:
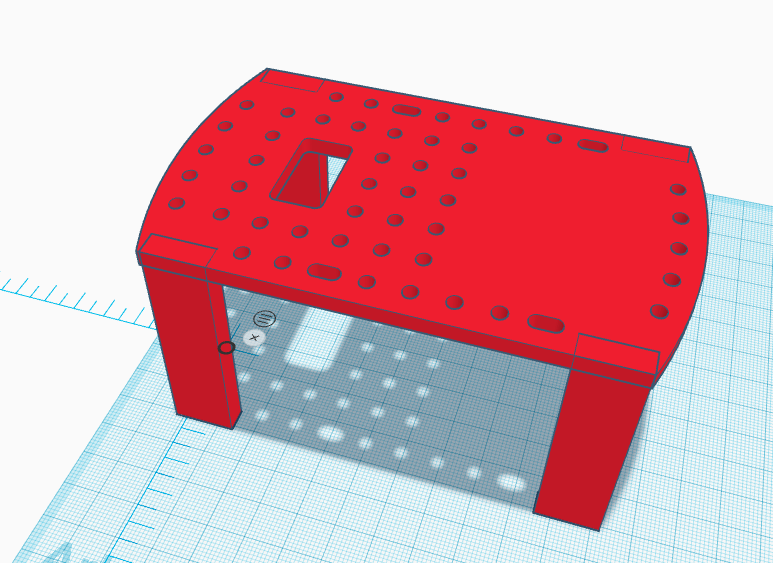
Die Plattform für den Lidar (und Yoda) wird gerade im Moment gedruckt:
Auch der 2-WD Roboter: R2D2 schreitet voran
Da ich jedoch gerade auf die Bestellung der Servomotoren* bei Amazon warte, muss die Kamerasteuerung noch etwas warten.
Ein höhenverstellbarer Car Stand erleichtert das Testen der Motorsteuerung.
Den Car Stand kann man bei Thingiverse herunterladen: https://www.thingiverse.com/thing:5186958

*Affiliate-Link zu Amazon.





