Jeder Roboter-Typ soll einen Fahrer bekommen. Da sich Luke dazu nicht so sehr eignet, habe ich mich entschlossen den Roboter umzubenennen.
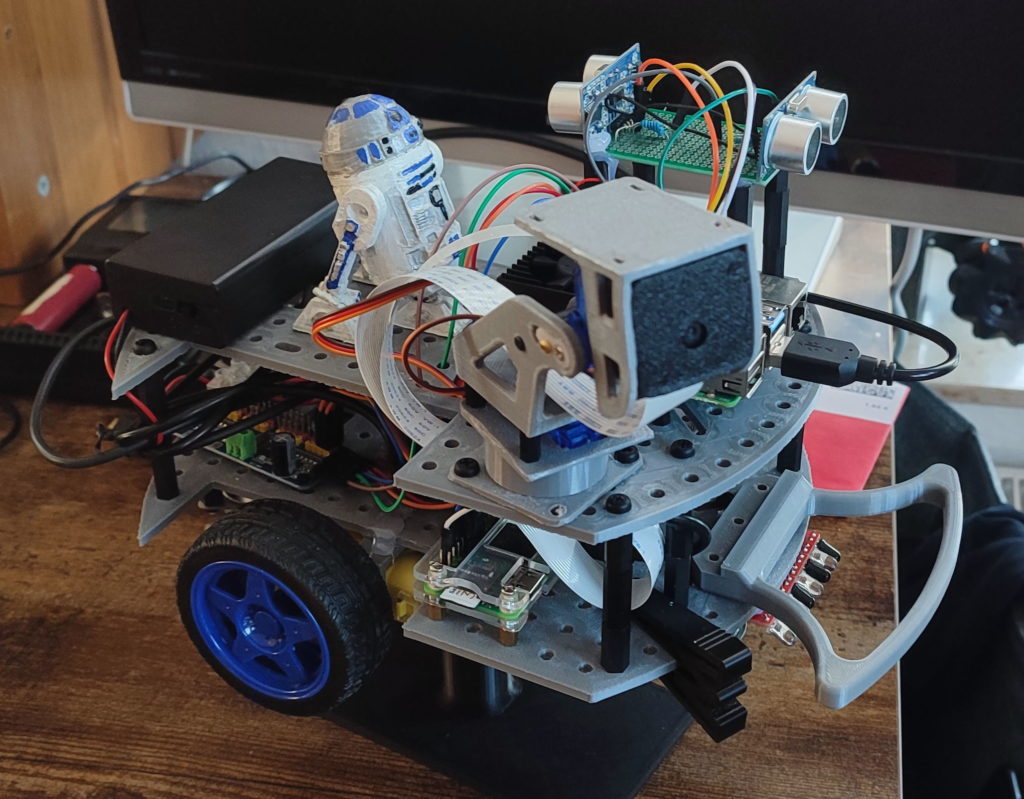
der Roboter R2D2 besteht dabei aus mehreren Raspberry Boards:
- Raspberry 4 mit 2GB
- Raspberry Zero 2
- und Raspberry Pico
Gespannt bin ich schon, ob die Integration von ROS2 dann auch mal klappt.
Bisher sträubt sich der Zero 2 noch mit Ubuntu 20.04 64 Bit zu laufen. Das ist aber eine Voraussetzung für ROS2.
Für den Pico existiert seit einiger Zeit die Möglichkeit für Micro-ROS.
Des weiteren habe ich über die Feiertage die Versionen auf den Robotern auf einen Stand zu bringen und die gemeinsam zu nutzenden Klassen vorzubereiten.





