Darth – Repository (NVidia Jetson) – Phase 1 befindet sich nun auf meinem GitHub Repository:
https://github.com/weboliver/darth
Startpunkt ist das Jupyter Notebook:
https://github.com/weboliver/darth/blob/master/Car/cartest.ipynb
Damit ein PWM Signal von den GPIO Pins erzeugt wird, muss auf dem JETSON Nano zuerst ein Tool installiert werden:
sudo apt-get install busybox
Dann kann man mit
sudo busybox devmem 0x700031fc 32 0x45 (Pin 32)
sudo busybox devmem 0x6000d504 32 0x2 (Pin 32)
sudo busybox devmem 0x70003248 32 0x46 (Pin 33)
sudo busybox devmem 0x6000d100 32 0x00 (Pin 33)
Ich habe die Befehle in die .bashrc hineinkopiert. Mag sein, dass es hierfür bessere Orte gibt. Mich stört es nicht.
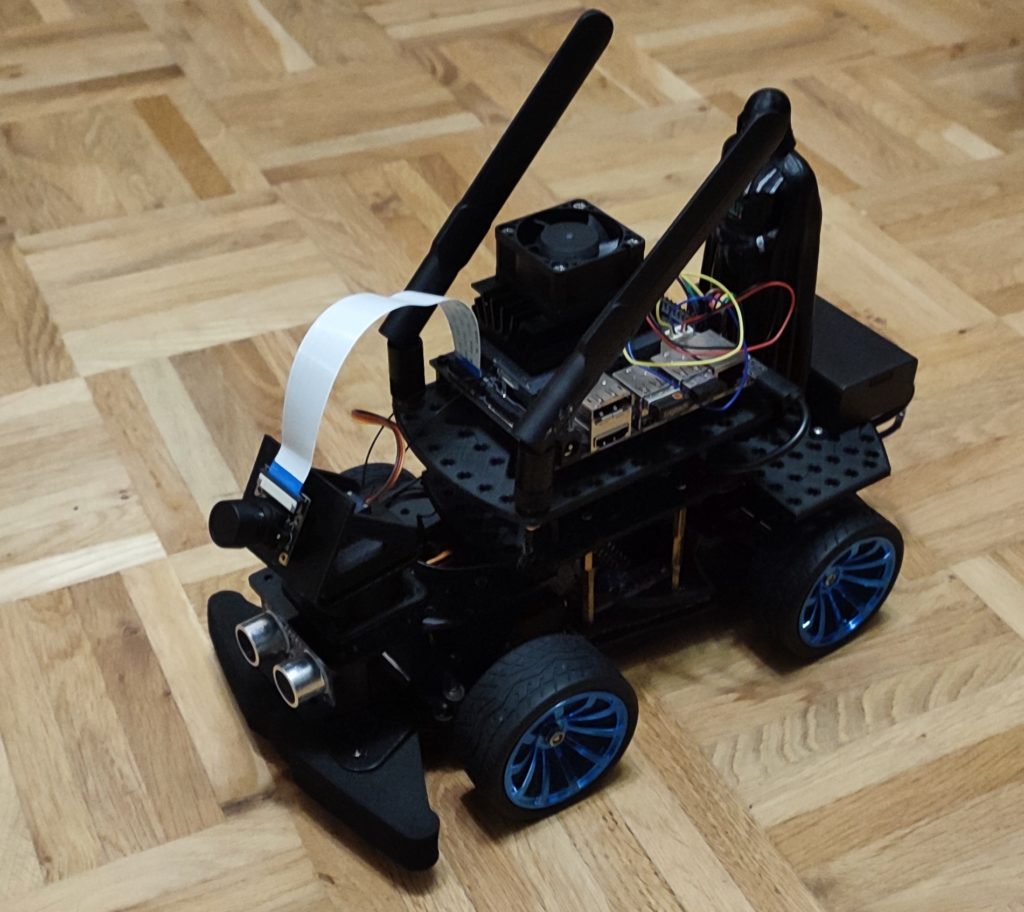
Ein noch ein paar Worte zur
Hardware:
Von Amazon* waren:
- Jetson Nano 4GB (den verlinke ich hier nicht, da zur Zeit unverschämt teuer).
- WaveShare Camera Module 8MP
- Servo Motor Steuerung (PCA9685)
- Gleichstrom Motor Steuerung (L298N)
- Akku Halterung (waren bei mir alle OK)
- Step Down 5V 3A (Stromversorgung NVIDIA Jetson)
- Verschiedene Abstandshalter und anderes Zubehör (Schrauben, Kabel, Heißkleber, Panzerband)
Das Chassis habe ich bei Roboter-Bausatz gekauft.
Die Akkus habe ich von Akku Teile.
*Die Links zu Amazon sind sogenannte „Affiliate Links“.





