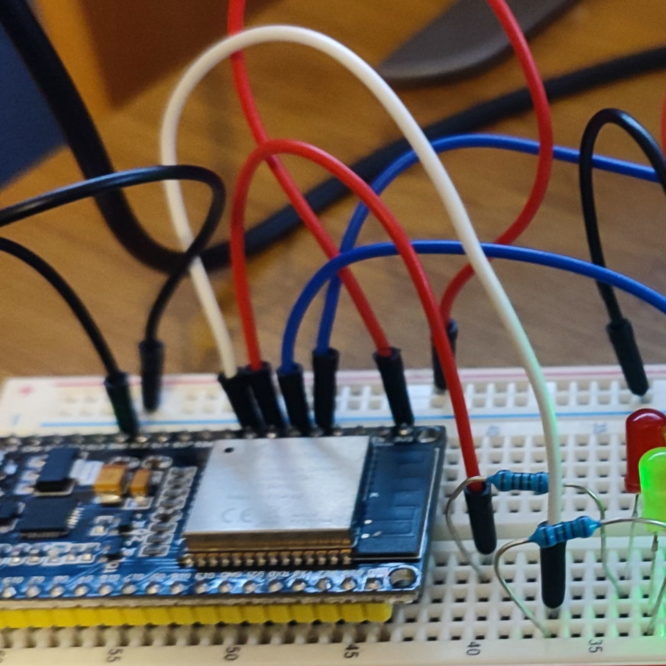
ESP32 – erste Schritte
Ein Grundkonzept der Roboter, die ich bauen will ist, dass es eine Aufteilung der Bereiche Sensorik, Motorsteuerung, Kameraauswertung oder KI
Roboter, Raspberry Pi und Jetson Nano
Ein Grundkonzept der Roboter, die ich bauen will ist, dass es eine Aufteilung der Bereiche Sensorik, Motorsteuerung, Kameraauswertung oder KI
Da die 4-8 GB Raspberry Pis derzeit Mangelware sind und Wucherpreise auf E-Bay oder Amazon nicht tolerierbar sind, hat der

Um ein Roboter auch manuell steuern zu können benötigt man einen Joystick, Joypad oder eine ähnliche Art der Steuerung. Hier
Nach einer Odyssee von Konfigurationsdateien anpassen, nicht aktivierbaren Bluetooth Treibern, fehlgeschlagener Kompilation des Boot Kernels für den Raspberri Pi Zero
weiterlesenUbuntu fliegt wieder runter von den Raspi-Zero Bots
Nachdem die Installation von Ubuntu 21.10 auf dem Raspberry Zero 2 mehrfach fehlgeschlagen ist, habe ich mich entschlossen auf dem
Jeder Roboter-Typ soll einen Fahrer bekommen. Da sich Luke dazu nicht so sehr eignet, habe ich mich entschlossen den Roboter
Seit ich mir Ende November den 3D Drucker: Anycubic Vyper* zugelegt habe, beschäftige ich mich hauptsächlich mit den Möglichkeiten die