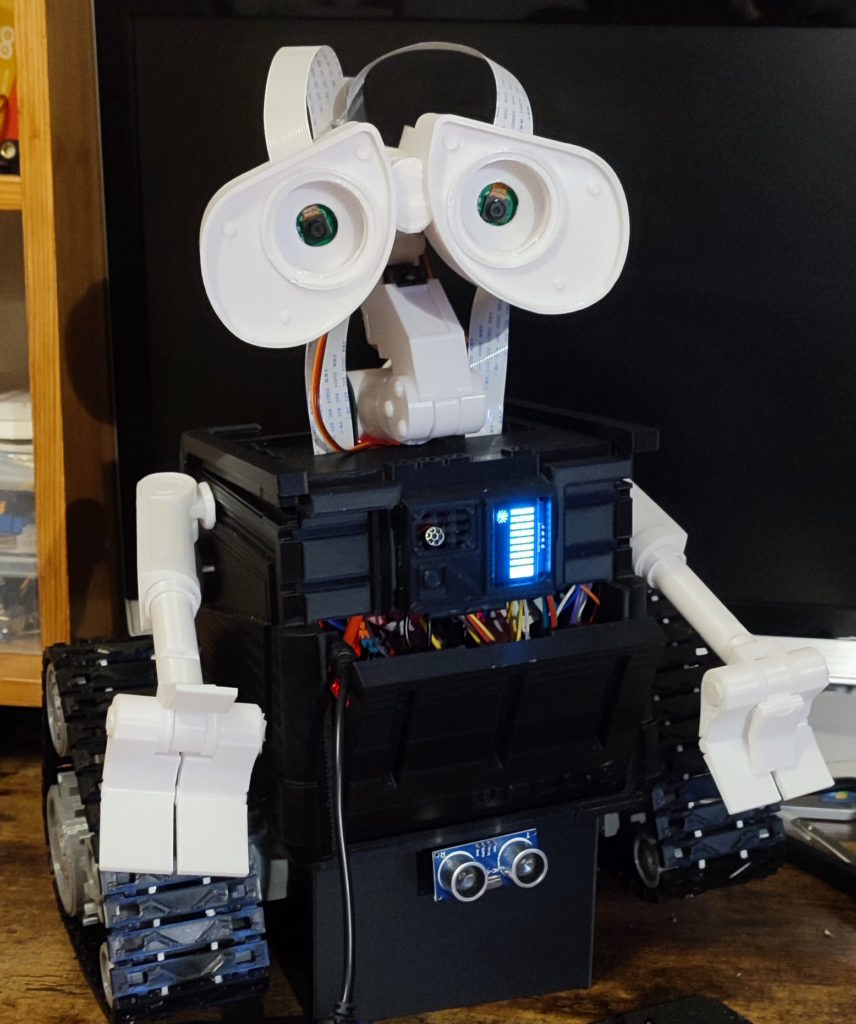
Seit längerem mal wieder ein Beitrag zu einem fertig gestellten Roboter. Ein kleines „Master-Piece“, wenn man so will. Die Vorlage des Robots besteht aus dem Thingiverse 3 D Modell von chillibasket.
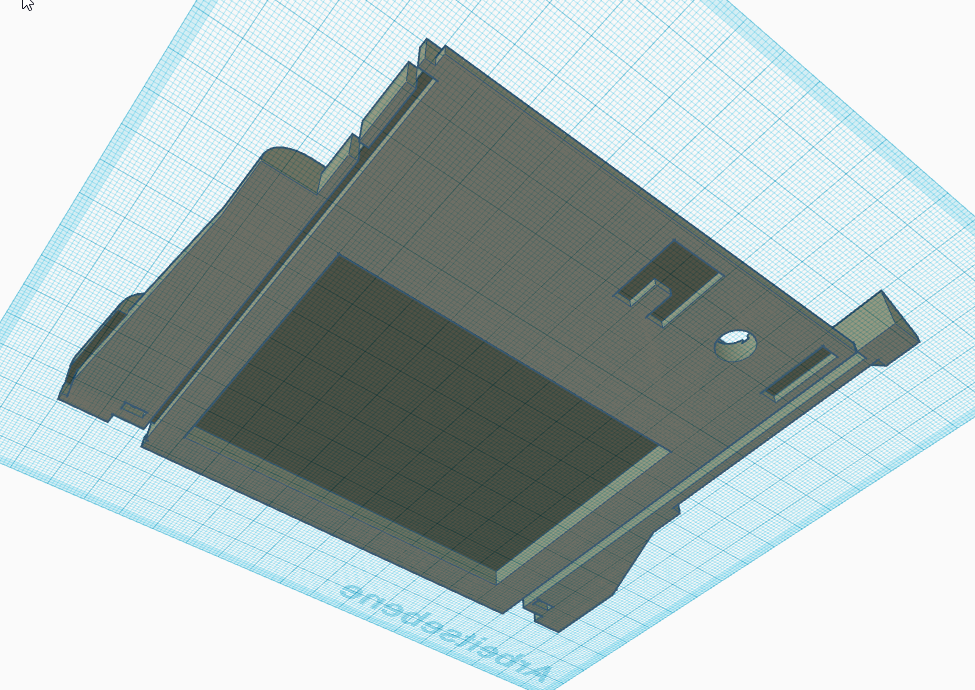
Das Modell habe ich insofern modifiziert, als dass ich alle Innenwände mit entsprechenden Bohrungen versehen habe, damit der Bauraum etwas vergrößert werden kann.
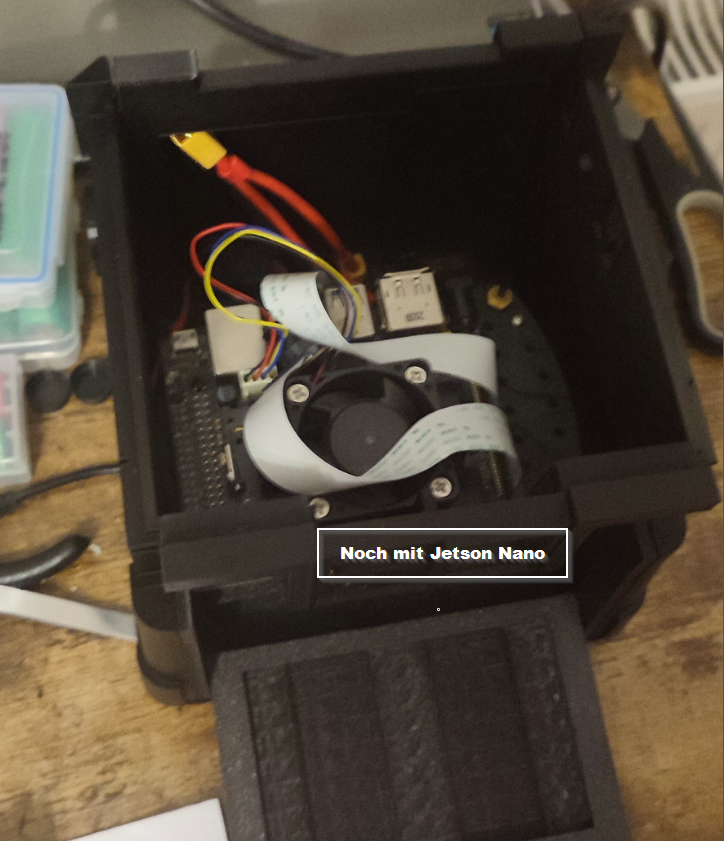
Wie man im Ergebnis sehen kann, war das auch bitter nötig:

Mit TinkerCad geht das jedoch leicht und stellte keine all zu große Herausforderung dar.
Ursprünglich sollte Wall-E mit einem Jetson – Nano betrieben werden, da das Board über 2 Kameraschnittstellen verfügt.
Dieser konnte jedoch nicht dazu überredet werden mit dem Arduino Board über die serielle Schnittstelle angesprochen zu werden. Zwar empfing der Nano Daten vom Arduino, das Senden jedoch gelang mir nicht. Ja, ich habe einen Logic Level Converter verwendet und zwar diesen hier: https://www.amazon.de/dp/B07NNRS8FS?th=1 und diesen hier: https://www.berrybase.de/logic-level-converter-3.3v-5v-ttl – klappte mit beiden nicht. Empfangen war einwandfrei. Senden, nein. Auch ließ sich der Jetson Nano nicht direkt per USB Kabel an den Arduino anschließen, da dieser mit dem Motor-Shield verbunden war und daher keine Spannungsversorgung über USB erwartete (nehme ich mal an). Aus mir unbekannten Gründen ging das Board in diesem Fall gar nicht an. Bei einem kleinen Unfall kam ich dann auch noch an die 12V Spannung während der Jetson Nano lief und musste ihn danach beerdigen.
Da der Plan war, 2 Kameras für die Augen zu verwenden, musste es also entweder ein Stereo Pi werden oder 2 Raspberries.
Ich entschied mich für letzteres, da das Projekt technologisch mit ROS2 betrieben werden soll und aktuell Raspberry Pi Single Board Computer schlicht nicht käuflich zu erwerben sind – außer man ist so bescheuert und wirft den Skalpern das Geld in den Rachen – baute ich kurzerhand die Boards aus meinen in der Ecke herum stehenden Roboter-Fahrzeugen aus:
2 x Raspberry Pi mit 2GB Hauptspeicher / damals noch bei Berry Base zu etwas über 50.- Euro.
Weiterhin kommen zu den Boards noch
- 1 x Raspberry Pi Zero 2 W
- 2 x Raspberry Pi Kameras
- 2 x Adapter zur Verlängerung der Kamera Kabel (sehr zu empfehlen)
- 1 x Servo Motor Steuerung
- 2 x Pololu Motoren (nicht ganz günstig)
- 7 x Servo Motoren
- 2x 128 GB SD-Karten (eine hatte ich noch)
- 2 x Lautsprecher
- 1 x Verstärker
- 2 x Spannungswandler (super! 5,3V / 4A)
- Lipo Akku 3 S
- Mikrofon
- 4 x HCR S04 Ultraschallsensoren
- 1 x 8 Kanal Logic Level Converter (von Amazon)
- 1 x 2 Kanal Logic Level Converter (von BerryBase)
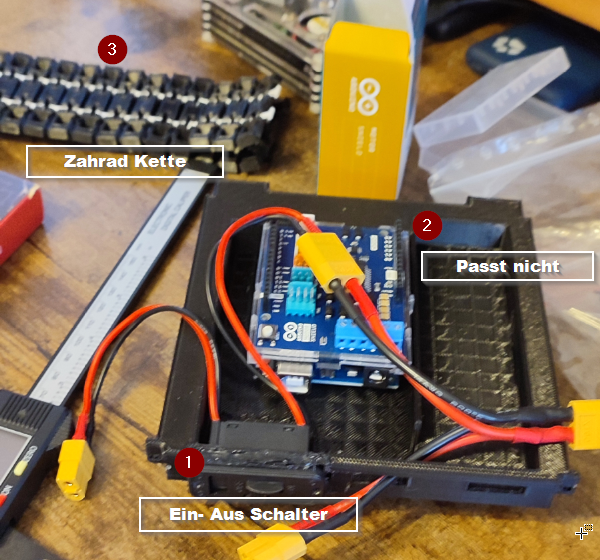
- Ein-Aus Schalter (weiß nicht mehr)
- etliche Kabel (Amazon und BerryBase)
Aller Anfang ist beschwerlich 🙂
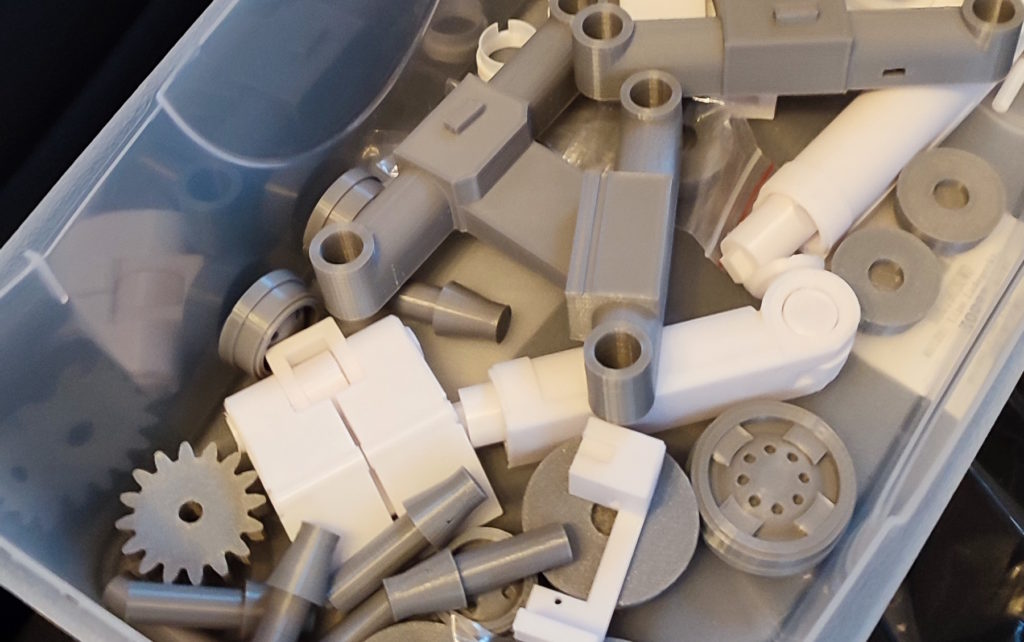
Über 250 Teile galt es auszudrucken, Fehldrucke und abgebrochene Zahnräder nicht eingerechnet.
Insgesamt war ich damit dann gut 6 Wochen beschäftigt die Ausdrucke zusammen zu bauen und die Bauteile zu montieren und zu verkabeln.

Dann vor ca. 3 Wochen stand Wall-E zum ersten Mal auf unserem Küchentisch.

Finally – die erste Probefahrt:

Der Verstärker und der Raspberry Pi Zero 2 haben nicht mehr in den dafür vorgesehenen Bauraum hinein gepasst, daher musste noch ein Rucksack hinten dran gebaut werden.
Auf allen Seiten befindet sich nun auch ein Ultrasonic Typ HCR – S04 der die Messdaten an den Raspberry Zero 2 sendet.
Finaler Stand: