Wall.E – Robot
Seit längerem mal wieder ein Beitrag zu einem fertig gestellten Roboter. Ein kleines „Master-Piece“, wenn man so will. Die Vorlage
Roboter, Raspberry Pi und Jetson Nano
Seit längerem mal wieder ein Beitrag zu einem fertig gestellten Roboter. Ein kleines „Master-Piece“, wenn man so will. Die Vorlage
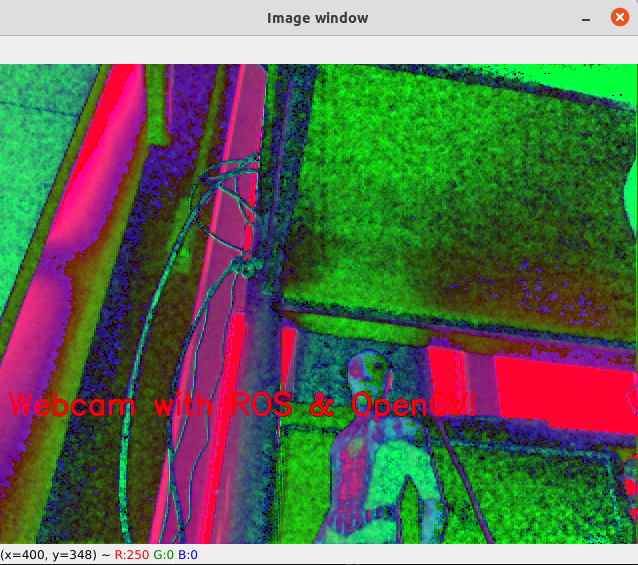
Das Verwenden der Kamera mit ROS ist erschreckend einfach: Voraussetzungen Man benötigt die ROS Library usb_cam (https://index.ros.org/p/usb_cam/github-ros-drivers-usb_cam/), die mit dem
Robot Operating System, kurz ROS, ist ein Framework, um den Herausforderungen, die sich Entwicklern bei der Erstellung von Roboter-Anwendungen stellen,
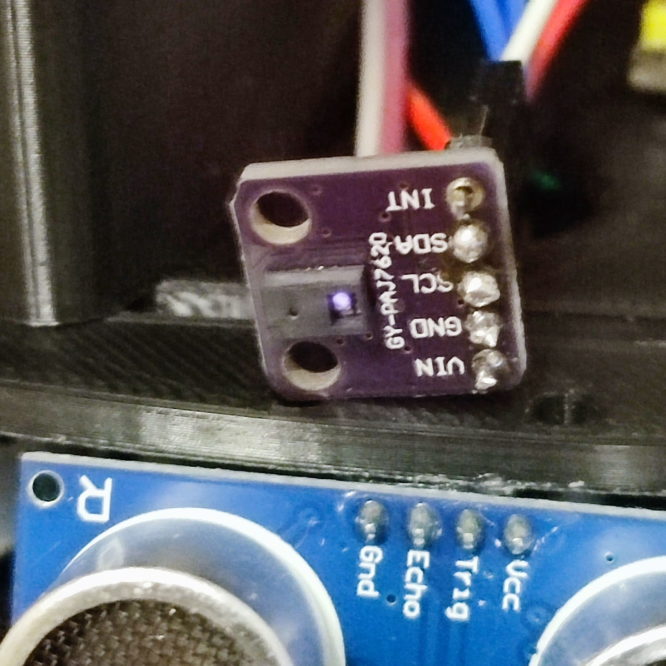
Ein kleiner Zwischenstopp während der Einarbeitung in ROS: Ich hatte mir vor ein paar Monaten das Gestenerkennungsmodul PAJ7620U2 bei der
Natürlich muss das Automatische Programm für die Fahrzeugsteuerung zum Autonomen Fahren des Roboters auch für die Vier-Rad Steuerung laufen. Wie
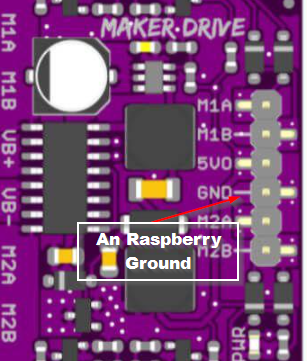
Der Cytron Maker Drive hat mich einige Nerven gekostet. Soviel schon mal vorweg. Damit dieses Board funktioniert, muss mindestens ein
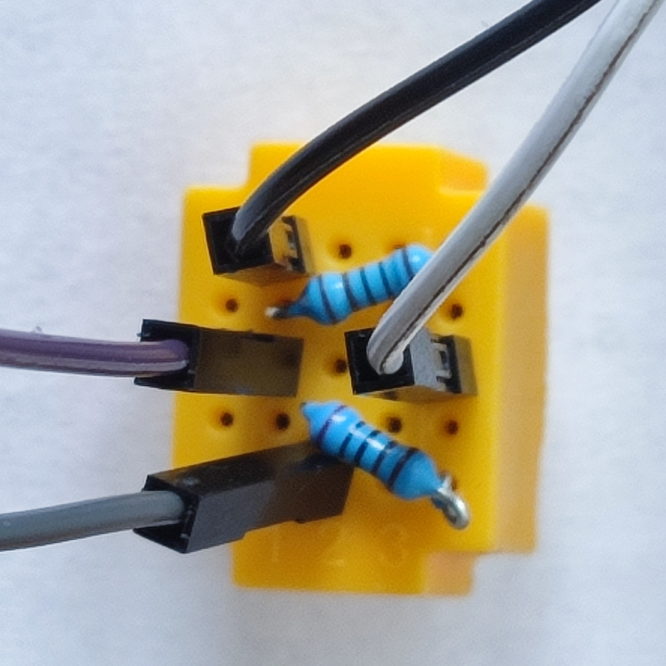
Nach den durchaus positiven Erfahrungen mit dem Ultraschallsensor beim Raspberry Pi, habe ich mich heute an den Anschluss und Betrieb
Heute bin ich dann auch mal dazu gekommen den aktuellen Stand des Raspberry Pi Projekts auf GitHub zu veröffentlichen. Die
Die UART Schnittstelle überträgt nun die Distanzmessungen, vorne und hinten vom Raspberry Pico zum Raspberry Zero 2. Raspberry Pico: Merke:
Der HCRS04 ist ein beliebter Ultraschall Sensor für die Kollisions Vermeidung von selbstfahrenden Roboter-Fahrzeugen. Um ihn mit einem Raspberry Pi